




Argo AI: Autonomes Fahren neu gedacht und erklärt
Argo AI war nie “nur noch ein selbstfahrendes Auto-Startup” – es war ein radikal technischer Ansatz, um autonomes Fahren auf Level 4 in die echte Stadt zu prügeln, statt in sterile Demozonen. Das Unternehmen ist zwar 2022 vom Markt verschwunden, aber sein Technologie-Stack, seine Datensätze und seine Methodik sind für jeden relevant, der heute ernsthaft an autonomen Systemen baut. In diesem Artikel zerlegen wir Argo AI und autonomes Fahren so gründlich, dass du die Mythen vergisst und nur noch Architektur, Safety Case, ODD-Design und MLOps siehst. Kein Hype, keine PR-Floskeln – nur ein sauberer Blick unter die Haube.
- Warum Argo AI trotz Shutdown ein Pflichtfallstudium für autonomes Fahren und Level-4-Stacks bleibt
- Wie Sensorfusion aus LiDAR, Radar und Kamera wirklich funktioniert – jenseits von Buzzwords
- HD-Maps, ODD, Redundanz und Safety Case: die harten Anforderungen an Robotaxis
- Perception, Prediction, Planning und Control: der komplette AV-Stack erklärt
- Simulation, Shadow Mode, Argoverse und MLOps: Daten- und Trainings-Pipeline ohne Märchenstunde
- ISO 26262, SOTIF, UL 4600: das Regulatorik-Dreieck, das Marketingabteilungen meiden
- Business-Realität: TCO, Wartung, Remote Assist und warum Scale kein Slide-Deck ist
- Checkliste: So evaluierst du einen autonomen Stack, bevor du Millionen verbrennst
Argo AI ist der Name, der in jeder ernsthaften Debatte über autonomes Fahren fällt, wenn es nicht um Pitchdecks, sondern um echte Systeme geht. Argo AI war Partner von Ford und Volkswagen, hat mit Argoverse einen der nützlichsten offenen Datensätze publiziert und Level-4-Piloten in komplexen Innenstädten gefahren. Argo AI steht damit für eine Lehrstunde darüber, wie man einen AV-Stack von der Sensorik bis zum Safety Case baut. Argo AI ist außerdem der Beweis, dass Technik allein nicht reicht, wenn das Geschäftsmodell und das Timing wackeln. Wer autonomes Fahren verstehen will, kommt an Argo AI nicht vorbei, egal ob er Kameras verklärt oder LiDAR verachtet.
Autonomes Fahren ist ein Systemproblem, kein Feature, und Argo AI hat das von Anfang an technisch gedacht. Autonomes Fahren braucht eine lückenlose Pipeline von Datenakquise, Annotation, Modelltraining, Validierung und Deployment, die unter realen Randbedingungen funktioniert. Autonomes Fahren braucht eine definierte Operational Design Domain, die ehrlich begrenzt, was das System kann – und was nicht. Autonomes Fahren verlangt Safety by Design, Redundanzpfade und einen Nachweis, der Behörden, Versicherer und Anwälte überzeugt. Und autonomes Fahren braucht eine Architektur, die nicht bei der ersten Baustelle, nassem Asphalt oder niedriger Wintersonne kollabiert.
Argo AI und autonomes Fahren: Level-4-Stack, ODD und Systemarchitektur erklärt
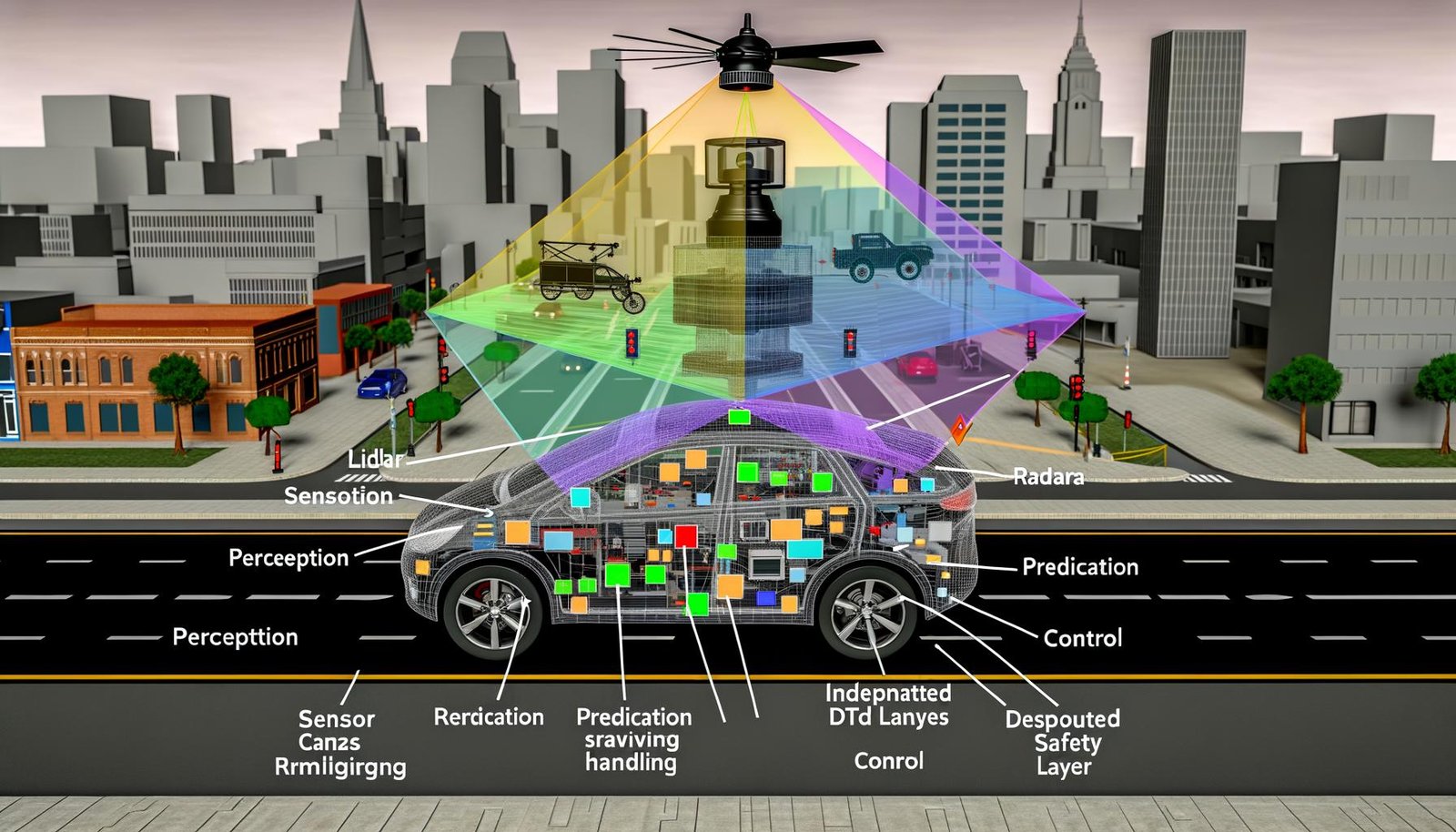
Argo AI hat autonomes Fahren als Level-4-Problem mit klarer Operational Design Domain aufgezogen, nicht als allgemeine KI-Magie. Der Stack gliederte sich in die klassischen Schichten Perception, Localization, Prediction, Planning und Control, ergänzt um Safety Layer, Redundanzpfade und einen Remote-Assist-Mechanismus. Entscheidend war die ODD-Definition: Wo, wann und unter welchen Bedingungen darf das Fahrzeug autonom fahren, inklusive Wetter, Verkehrsregeln und Infrastrukturvarianten. Diese ODD-Begrenzung ist kein Rückschritt, sondern eine Ingenieursentscheidung, die Messbarkeit, Validierung und regulatorische Abnahme ermöglicht. Argo AI hat damit den realistischen Weg gewählt, Pilotgebiete in US-Städten zu kartieren, Roboter-Toleranzen zu quantifizieren und schrittweise zu erweitern. Wer Level 4 ohne ODD predigt, verkauft Träume, keine Technik.
Die Systemarchitektur von Argo AI war serviceorientiert und hart in Echtzeitforderungen eingebettet. Perception-Module mussten Sensordaten in Millisekundenlatzen fusionieren, mit deterministischen Latenzbudgets und priorisierten Queues. Prediction-Modelle erzeugten Mehrmodalszenarien, die Unsicherheit explizit modellierten und den Planer nicht mit Hornsignalen, sondern mit Wahrscheinlichkeitsmassen fütterten. Der Planner rechnete Trajektorien unter Constraints wie Dynamikgrenzen, Komfortmetriken, Regeln und Safety Envelopes, abgesichert durch einen Watchdog, der jederzeit auf Minimal Risk Maneuvers wechseln konnte. Control implementierte Model Predictive Control oder ähnlich robuste Regler, die auf Chassis-Niveau mit Redundanzpfaden kommunizierten. Diese Kette ist nur so stark wie ihr schwächstes Latenzglied, und genau diese Disziplin trennte Argo AI von PowerPoint-Fahrern.
Argo AI hat früh verstanden, dass autonome Systeme nur mit End-to-End-Vernetzung aus Fahrzeug, Edge und Cloud skalieren. Flottenmanagement, Telemetrie und Datenoffloading waren keine Add-ons, sondern die Betriebsbasis für kontinuierliches Lernen. OTA-Updates waren orchestriert, versioniert und rückrollbar, mit strenger Gatekeeping-Logik über CI/CD-Stufen. Shadow Mode erlaubte es, neue Modelle im Hintergrund gegen die Produktionsentscheidungen zu benchmarken, bevor auch nur ein Byte in den aktiven Stack wanderte. Die Infrastruktur musste Datensouveränität, Latenzbudgets und regulatorische Anforderungen simultan erfüllen, was die Architektur zwingend in Richtung standardisierter MLOps und DevSecOps trieb. Wer hier improvisiert, verliert Safety, Consent und das Recht, überhaupt auf die Straße zu dürfen.
Perception und Sensorfusion bei Argo AI: LiDAR, Radar, Kamera und HD-Maps
Die Perception-Schicht von Argo AI kombinierte LiDAR, Radar und Kameras, weil Physik keine ideologischen Debatten führt. LiDAR liefert metrisch akkurate Tiefeninformationen und robuste 3D-Geometrie, Radar ergänzt mit Doppler für Relativgeschwindigkeiten und guter Performance bei Regen, Kameras liefern Textur, Farbe und hochauflösende SemantikSemantik: Das Rückgrat digitaler Bedeutung und SEO-Power Semantik bezeichnet die Lehre von der Bedeutung – im Web, im Marketing und vor allem im SEO-Kontext. Sie beschreibt, wie Wörter, Sätze und Inhalte miteinander verwoben sind, um Kontext, Relevanz und Sinn zu schaffen. Semantik ist weit mehr als nur ein akademischer Begriff: Sie ist das Fundament, auf dem moderne Suchmaschinen, KI-Systeme und.... Sensorfusion auf Feature- oder Objekt-Level reduziert Fehlalarme, erhöht Recall und kompensiert Ausfälle einzelner Modalitäten. Argo AI setzte auf dichte 3D-Detektion, Segmentierung und TrackingTracking: Die Daten-DNA des digitalen Marketings Tracking ist das Rückgrat der modernen Online-Marketing-Industrie. Gemeint ist damit die systematische Erfassung, Sammlung und Auswertung von Nutzerdaten – meist mit dem Ziel, das Nutzerverhalten auf Websites, in Apps oder über verschiedene digitale Kanäle hinweg zu verstehen, zu optimieren und zu monetarisieren. Tracking liefert das, was in hippen Start-up-Kreisen gern als „Daten-Gold“ bezeichnet wird..., die in der Stadt nicht nur Autos und Fußgänger, sondern auch Kurierfahrer, Hunde an Leinen und fahrende Mülltonnen zuverlässig erfassen mussten. Ohne robuste Datenassoziation im Multi-Target-Tracking bricht jede Vorhersagekette, und genau hier trennt sich die Forschung vom Betrieb. Perception ist nicht “Bildchen erkennen”, sondern Bayesianik auf Rädern.
HD-Maps waren für Argo AI keine Krücke, sondern ein Sicherheits- und Effizienz-Multiplikator. Die Karten enthielten Fahrspuren, Prioritäten, Kreuzungsgeometrien, Stopp-Linien, Ampelstandorte und oft sogar Rasterhöhenmodelle, die in Echtzeit mit Sensorik abgeglichen wurden. Lokalisierung kombinierte GNSS, IMU, Raddrehzahlsensoren und LiDAR-SLAM, um zentimetergenau auf den Map-Layer zu “snappen”. Map-Updates liefen als Data Ops, bei denen neue Beobachtungen, Baustellen oder temporäre Sperrungen in kurzer Taktung eingespielt wurden. Ohne Map-Health-Monitoring wird ein AV blind für geänderte Randbedingungen, und genau deshalb hatte Argo AI dedizierte Teams für Map-Validation und Change Detection. Karten sind lebende Artefakte, keine PDF-Dateien; wer sie statisch denkt, baut Altmetall.
Sensorik ist zudem ein logistisches Thema, das in die TCO-Rechnung einfließt. LiDAR-Sensoren sind teurer, aber ihr Preis ist seit Jahren unter Druck und sinkt mit Volumen, während Kameras billig, aber bei Nacht und starkem Glare tückisch sind. Radar wird unterschätzt, weil seine Auflösung geringer wirkt, doch seine Doppler-Information rettet in Regen und Nebel mehr, als Hochglanzbroschüren zugeben. Argo AI dimensionierte Sensorfelder redundant, mit Überlappungen, Failover-Pfaden und Selbstdiagnose, die Degradationsmodi früh erkennt. Die Frage ist nie “LiDAR ja oder nein”, sondern “Welche ODD, welche Redundanz, welche Wartungszyklen, welcher Safety Case?”. Wer diese Fragen nicht auf dem Tisch hat, betreibt Ideologie statt Ingenieurskunst.
Prediction, Planning und Control: Motion Forecasting, Behavior Planning und Safety Layer
Motion Forecasting ist der Bereich, in dem Argo AI massiv investiert hat, weil Stadtverkehr nicht deterministisch ist. Statt nur eine Zukunft zu prophezeien, modellierten die Systeme mehrere plausible Pfade für jede Verkehrseinheit, inklusive Interaktionshypothesen. Graph-basierte und Deep-Learning-Modelle kombinierten Kontext aus Fahrspuren, Regeln, Dynamikgrenzen und beobachtetem Verhalten, um mehrmodale Verteilungen zu schätzen. Diese Vorhersagen fütterten einen Planner, der nicht “die” richtige Trajektorie wählt, sondern kontinuierlich Risiko und Fortschritt balanciert. Das Ziel ist nicht maximale Effizienz, sondern Mindestunsicherheit bei maximaler Regelkonformität innerhalb des Komfortkorridors. Argo AI verstand, dass der Planer keine Roulettekugel ist, sondern ein Constraint-Löser unter Unsicherheit.
Behavior Planning übersetzt Regeln und Absichten in fahrbare Strategien, die in MPC- oder Sampling-basierten Controllern enden. Ampel-Compliance, Right-of-Way, Gap Acceptance und Interaktion mit Fußgängern sind kodifiziert, aber nicht starr; sie sind parametrisiert und adaptiv, damit das Fahrzeug weder blockiert noch aggressiv wird. Ein Safety Layer prüft jede geplante Trajektorie gegen formale Safety Envelopes und kann jederzeit ein Minimal Risk Maneuver auslösen. Diese Trennung zwischen Performance- und Safety-Pfad ist kein Luxus, sondern regulatorische Notwendigkeit für Level 4. Argo AI setzte zusätzlich auf Watchdog-Timer, Heartbeats und konsistente Timings, damit keine Race Conditions zwischen Modulen unentdeckt bleiben. Wer Safety als “wir fahren vorsichtig” verkauft, hat das Thema nicht ansatzweise verstanden.
Control bringt die Theorie auf Asphalt und verzeiht keine schlampige Dynamikmodellierung. Reifenkräfte, Reibwerte, Fahrzeugmasse, Schwerpunktlage und Aktuatorlatenzen bestimmen, ob eine Trajektorie überhaupt fahrbar ist. Model Predictive Control, LQR-Varianten oder adaptive Regler arbeiten nur dann gut, wenn Sensorkalibrierung und Zustandschätzung stimmen. Argo AI koppelte Control eng an einen State Estimator, der aus IMU, Raddrehzahlen und eventuell LiDAR-Odometrie robuste Zustände liefert. Redundante Signalketten und Fallback-Strategien verhindern, dass ein fehlerhafter Sensor das gesamte System entgleisen lässt. In der Praxis entscheidet sich hier, ob ein AV bei nasser Fahrbahn sanft bremst oder in die Schrebergärten segelt.
Daten, Simulation und MLOps bei Argo AI: Argoverse, Shadow Mode und CI/CD
Argo AI hat mit Argoverse einen Datensatz veröffentlicht, der der Forschungsgemeinde unzählige Stunden gespart hat. Argoverse enthält sorgfältig annotierte Szenen aus urbanen Umgebungen, inklusive HD-Maps und 3D-Bounding-Boxes, die für Motion Forecasting und Perception taugen. Dieser Schritt war kein altruistischer PR-Stunt, sondern Teil einer klugen Datenstrategie: externe Validierung, Talentakquise und Benchmark-getriebene Verbesserung. Interne Datensätze waren natürlich um Größenordnungen größer und durchlaufen ein strenges Pipeline-Regime aus Ingest, Qualitätschecks, Anonymisierung, Auto-Labeling und menschlicher Verifikation. Ohne diese industrielle Datenhygiene wird jedes neurale Netz zum Müllkompressor mit hübschem Loss-Plot. Daten sind die Produktionskette, nicht die Fußnote.
Simulation war bei Argo AI kein Computerspiel, sondern ein Validierungsinstrument mit Hardware-in-the-Loop und Szenario-Injektion. Stochastische Szenariogeneratoren erzeugten Corner Cases, die auf der Straße selten, aber sicherheitskritisch sind, etwa Geisterfahrer, verdeckte Fußgänger oder aggressive Lane Cuts. Digitale Zwillinge von Testgebieten ermöglichten Regressions-Tests gegen neue Softwareversionen, inklusive Sensorartefakten wie Blooming oder Radar-Clutter. Der Shadow Mode ließ neue Modelle parallel zu Produktionsmodellen laufen, um Disagreements zu messen und gezielt Datenlücken zu schließen. Diese Schleife – Disagreement Mining, Re-Labeling, Re-Training, Re-Deployment – macht den Unterschied zwischen Demo und Betrieb. Wer Corner Cases nicht proaktiv jagt, wird von ihnen gejagt.
MLOps und CI/CD hielten den Wahnsinn zusammen und verhinderten Wildwuchs. Modelle sind Artefakte mit Versionen, Trainingsumgebungen, Feature-Definitionen und Abhängigkeiten, die reproduzierbar sein müssen. Argo AI arbeitete mit Feature Stores, Pipeline-Orchestrierung, Canary Releases und strikten Rollback-Strategien, damit keine “Works on my laptop”-Momente auf die Straße gelangen. Telemetrie aus der Flotte wurde nicht nur gesammelt, sondern in KPI-getriebene Dashboards gegossen, die Safety, Comfort, Regelverstöße und Edge-Case-Häufigkeit abbildeten. Governance-Mechanismen stellten sicher, dass kein Modell ohne signoff von Safety, Legal und Operations live geht. Das ist langweilig – und genau deshalb überlebenswichtig.
Safety, Regulierung und Deployment: ISO 26262, SOTIF, UL 4600 und Redundanz
Safety ist kein Marketingwort, sondern ein dokumentierter Nachweisprozess, und Argo AI spielte strikt nach diesem Regelbuch. ISO 26262 adressiert funktionale Sicherheit elektrischer/elektronischer Systeme im Fahrzeug, inklusive ASIL-Einstufungen, die Designentscheidungen bestimmen. SOTIF (ISO/PAS 21448) kümmert sich um Sicherheitsrisiken ohne klare Fehlfunktion, also um Situationen, in denen das System formal korrekt arbeitet, aber die Welt komplexer ist als das Training. UL 4600 bündelt Prinzipien für autonome Produkte und zwingt zu einem ganzheitlichen Safety Case, der Annahmen, Datenqualitäten und Validierungsumfang offenlegt. Argo AI integrierte diese Standards in Entwicklungsprozesse, Testpläne und Release-Gates, um Compliance nicht am Ende dranzukleben. Ohne diese Schicht ist jedes Robotaxi nur ein spektakulärer Rechtsfall auf Rädern.
Redundanz war bei Argo AI nicht optional, sondern strukturelle Pflicht. Sensorische Diversität verhindert gemeinsame Ausfallmodi, elektrische Redundanz im Power-Netz schützt vor Brownouts, und Computing-Redundanz stellt sicher, dass ein einzelner SoC-Ausfall nicht den Safety Layer blind macht. Kommunikationsbusse sind doppelt, Datenpfade überwacht, und Health-Checks entscheiden, wann das System in einen Minimal Risk Condition übergeht. Remote Assist ist ein Teil des Konzepts, aber kein Remote Driving; menschliche Operator geben taktische Hinweise in Edge Cases, während das Fahrzeug Kontrolle und Safety behält. Diese Mischung reduziert On-Board-Intelligenz nicht, sondern erhöht Systemrobustheit und operative Verfügbarkeit. Wer Redundanz aus der Stückliste streicht, spart kurzfristig und zahlt langfristig mit Vertrauensverlust.
Deployment in Städten bedeutet Politik, Verträge und Infrastruktur – nicht nur Software. Genehmigungen verlangen Safety Cases, Datenzugang kann an Auflagen geknüpft sein, und Betriebsfenster definieren sich oft über Kommunalregeln. Argo AI arbeitete deshalb mit Verkehrsbehörden, ÖPNV und Flottenbetreibern, um nicht gegen, sondern mit dem System zu skalieren. Die Wahrheit ist simpel: Ohne klare ODD, operatives Playbook und Wartungsregime ist jede Flotte nach Monaten mechanisch und organisatorisch am Limit. Nachhaltiges Deployment ist die Kunst, Technik, Recht und Betrieb zu verheiraten, nicht eine Pressekonferenz in der Innenstadt.
Schritt-für-Schritt: So evaluierst du einen AV-Stack wie Argo AI – ohne dich zu blamieren
Ein AV-Stack ist kein schwarzer Kasten, wenn du strukturiert prüfst. Beginne mit der ODD: Welche Straßenklassen, Wetterbedingungen, Tageszeiten und Geschwindigkeitsbereiche sind abgedeckt, und wie wird das dokumentiert und überwacht? Analysiere die Sensorik: Abdeckung, Redundanz, Kalibrierprozesse, MTBF-Werte und Selbstdiagnosepfade gehören in jede Due Diligence. Beurteile die Perception: Benchmarks auf offenen Datensätzen sind nett, aber zähle Fleet KPIsKPIs: Die harten Zahlen hinter digitalem Marketing-Erfolg KPIs – Key Performance Indicators – sind die Kennzahlen, die in der digitalen Welt den Takt angeben. Sie sind das Rückgrat datengetriebener Entscheidungen und das einzige Mittel, um Marketing-Bullshit von echtem Fortschritt zu trennen. Ob im SEO, Social Media, E-Commerce oder Content Marketing: Ohne KPIs ist jede Strategie nur ein Schuss ins Blaue.... wie Missed Detections, False Positives, Track Fragmentations und Latenz quantifiziert. Schaue dann auf Prediction und Planning: Welche Metriken belegen Komfort, Regelkonformität, Interaktionskompetenz und Recovery-Verhalten unter Störungen? Erst dann lohnt sich eine Diskussion über fancy Model-Architekturen.
Technische Exzellenz ohne MLOps ist ein Kartenhaus. Frage nach Pipeline-Orchestrierung, Reproduzierbarkeit, Data Provenance und einem klaren Prozess, wie Disagreements in Training zurückfließen. Ohne Shadow Mode ist jedes Deployment ein Feldexperiment mit echten Menschen, und das ist ethisch wie regulatorisch fragwürdig. Verlange Canary- und A/B-Strategien, die auf harte Safety-Gates treffen, statt auf Bauchgefühl. Bestehe auf Telemetrie, die deine KPI-Fragen beantworten kann, nicht nur hübsche Linien malt. Und bitte: Überprüfe OTA-Strategien auf Signaturen, Rollback und sichere Boot-Ketten, sonst patchst du dich direkt in die Schlagzeilen.
Am Ende entscheidet das Betriebshandbuch über Scale. Wie werden Fahrzeuge gewartet, Sensoren gereinigt, Software-Versionen kanalisiert, und wie schnell dreht die Organisation einen Fix, wenn ein Regress auftaucht? Welche Remote-Assist-Prozesse existieren, welche Eskalationspfade, welche Schulungen für Operator und Techniker? Wie wird die ODD erweitert, welche Evidenz fordert die Governance, und welche Metriken müssen dafür grün sein? Das ist trocken, aber genau hier unterscheiden sich Showcases von Systemen, die eine Stadt über Jahre zuverlässig bedienen. Wer hier nicht liefert, hat kein Produkt, sondern eine Demo mit Hoffnung.
- Definiere ODD granular: Straßenklassen, Wetter, Zeitfenster, Edge Cases, und verknüpfe sie mit Metriken.
- Prüfe Sensorik: Abdeckung, Redundanz, Kalibrierung, Reinigungs- und Wartungskonzepte, Ausfallmodi.
- Validiere Perception: Precision/Recall pro Klasse, MOTA/MOTP, Latenz, Degradationsverhalten bei Regen/Glare/Nacht.
- Bewerte Prediction: Mehrmodalität, Interaktionsmodelle, Kalibrierung der Unsicherheit, Szenarioabdeckung.
- Auditiere Planning/Control: Constraint-Handling, Safety Envelopes, Minimal Risk Maneuvers, Komfortmetriken.
- Inspektiere MLOps: Feature Store, Reproduzierbarkeit, Data Provenance, Shadow Mode, Canary Releases.
- Checke Safety/Regulatorik: ISO 26262, SOTIF, UL 4600, Safety Case Dokumentation, Testabdeckung.
- Betrachte Betrieb: OTA-Sicherheit, Telemetrie, Remote Assist, Wartung, KPI-Dashboards, Incident-Response.
Skalierung ist schließlich eine ökonomische Gleichung. Rechne Total Cost of Ownership nicht nur über Hardware, sondern über Reinigung, Rekalibrierung, Ersatzteile, Netzkosten und Menschen im Loop. Argo AI hat gezeigt, dass Technik ohne tragfähige Unit Economics nicht abhebt, selbst wenn die Prototypen glänzen. Aber genauso gilt: Wer Technik schlampig rechnet, verbrennt in der Operation Geld, das kein Pitch zurückholt. Wer AV ernst meint, investiert zuerst in Messbarkeit und Prozessdisziplin und erst dann in Werbefolien. Alles andere ist Hofzauberei.
Zum Schluss muss die Branche ehrlich bleiben: Argo AI hat viel richtig gemacht und dennoch die wirtschaftliche Ziellinie verpasst. Das ändert nichts daran, dass seine technische Methodik der richtige Kompass für autonomes Fahren bleibt. Wer heute einen AV-Stack baut, sollte Argoverse studieren, ODDs scharf schneiden, Simulation lieben lernen und Safety dokumentieren, als hinge die Betriebserlaubnis davon ab – denn genau das tut sie. Wer es leichter will, sollte kein Robotaxi bauen. Die Straße verzeiht keine PowerPoint.
Autonomes Fahren lebt von Redundanz, Datenqualität und Demut vor der Realität. Argo AI hat diese drei Dinge praktisch vorgeführt, und die Spuren sind nutzbar – in Code, in Datensätzen, in Prozessen. Die Lektion ist unromantisch, aber mächtig: Baue Systeme, nicht Slides; beweise Safety, statt sie zu behaupten; und designe deine ODD, bevor du von “General AI” träumst. Wer das beherzigt, kommt an – vielleicht später als gedacht, aber sicherer als gewünscht. Und genau darum geht es.